
Des robots spécifiquement dédiés à la résolution d'un Rubik's Cube en un temps record, ce n'est pas nouveau, tout comme le recours à l'apprentissage par renforcement - ne s'appuyant pas sur une base d'exemples en entrée et avec des interactions avec l'environnement - pour résoudre ce casse-tête inventé dans les années 1970.
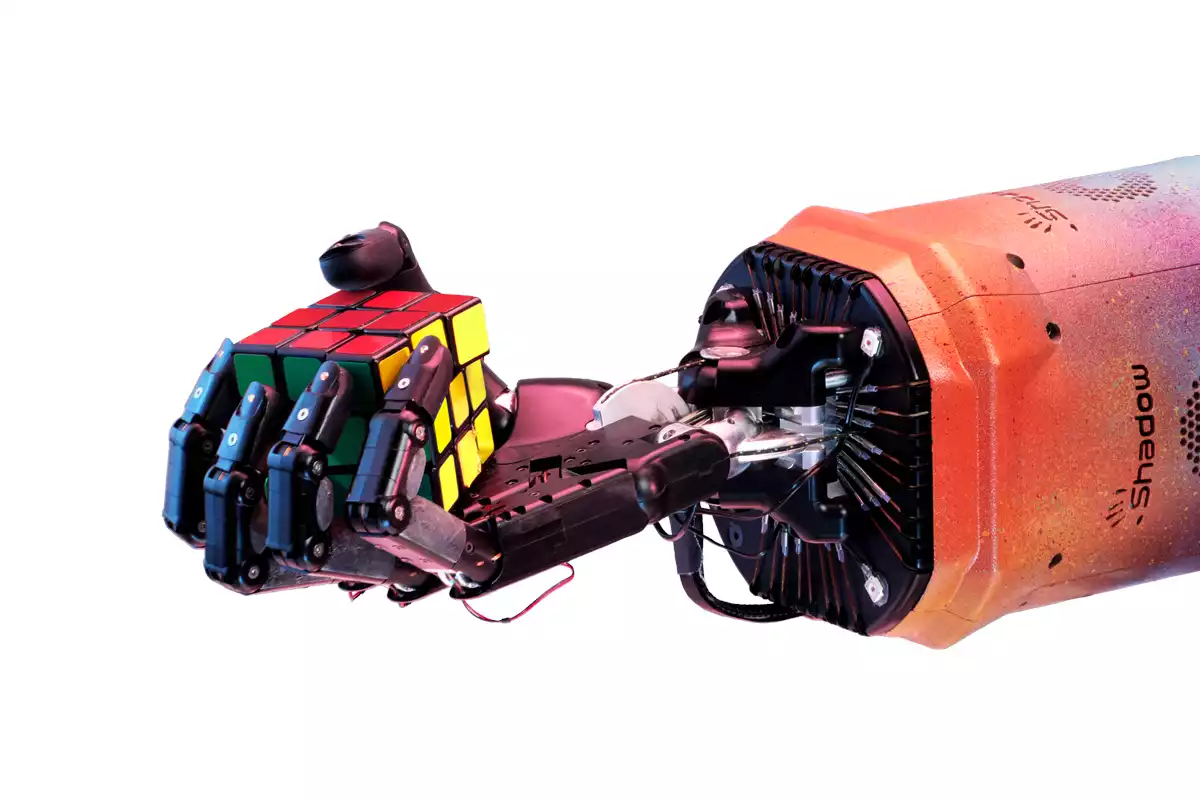
Sous l'égide de travaux de chercheurs d'OpenAI, la main robotique humanoïde Dactyl a appris à résoudre un Rubik's Cube. À une main et pour un système qui n'a pas été spécifiquement dédié à cette tâche, cela demande une grande dextérité et précision dans le contrôle des doigts.
Des réseaux de neurones artificiels ont été entièrement entraînés en simulation en utilisant un code d'apprentissage par renforcement. Il a ensuite fallu passer de la simulation au monde réel avec le transfert au robot.
Parmi les défis à relever, il y a par exemple eu la création d'environnements suffisamment variés en simulation pour correspondre au monde physique et avec la prise en compte de contraintes en introduisant un caractère aléatoire.
Cela se traduit par le fait que la main robotique est capable d'endurer plusieurs perturbations tout en résolvant le Rubik's Cube.
Les chercheurs soulignent que la main robotique est capable de résoudre un Rubik's Cube 60 % du temps et seulement 20 % du temps avec un mélange complexe nécessitant 26 mouvements. Une technique qui n'est donc pas parfaite.
L'échec est notamment dû à la difficulté pour le réseau neuronal artificiel de concilier la résolution du puzzle et l'adaptation au monde physique. C'est surtout le cas lors des premiers mouvements.
Reste que la résolution d'un Rubik's Cube n'est pas en soi le but recherché. C'est plutôt une étape vers la gestion d'une grande diversité de tâches pour le robot.
