


Les prochaines missions martiennes représentent un enjeu de taille pour les agences spatiales. Outre les diverses problématiques liées à la capacité d'emport au décollage des fusées, il se présente également celles du processus d'atterrissage des modules.

On l'a vu avec le module Schiapaerlli ou encore avec Philae, rien ne sert de dépenser des millions d'euros dans des programmes si l'on n'a pas l'assurance de poser convenablement les modules de recherche sur les astres ciblés.
La faible densité de Mars pose ainsi un problème de taille, puisque les parachutes y ont un effet de ralentissement plus limité que sur Terre. Pour positionner Curiosity à la surface de mars, un système spécial avait été déployé, mais la NASA avait déjà atteint quelques limites et ne peut pas miser sur ce dernier pour envoyer des charges plus lourdes sur la planète.

Sans système d'atterrissage fiable, la NASA s'adapte et mise désormais sur des robots plus petits, aux fonctionnalités plus limitées, mais également plus nombreuses.
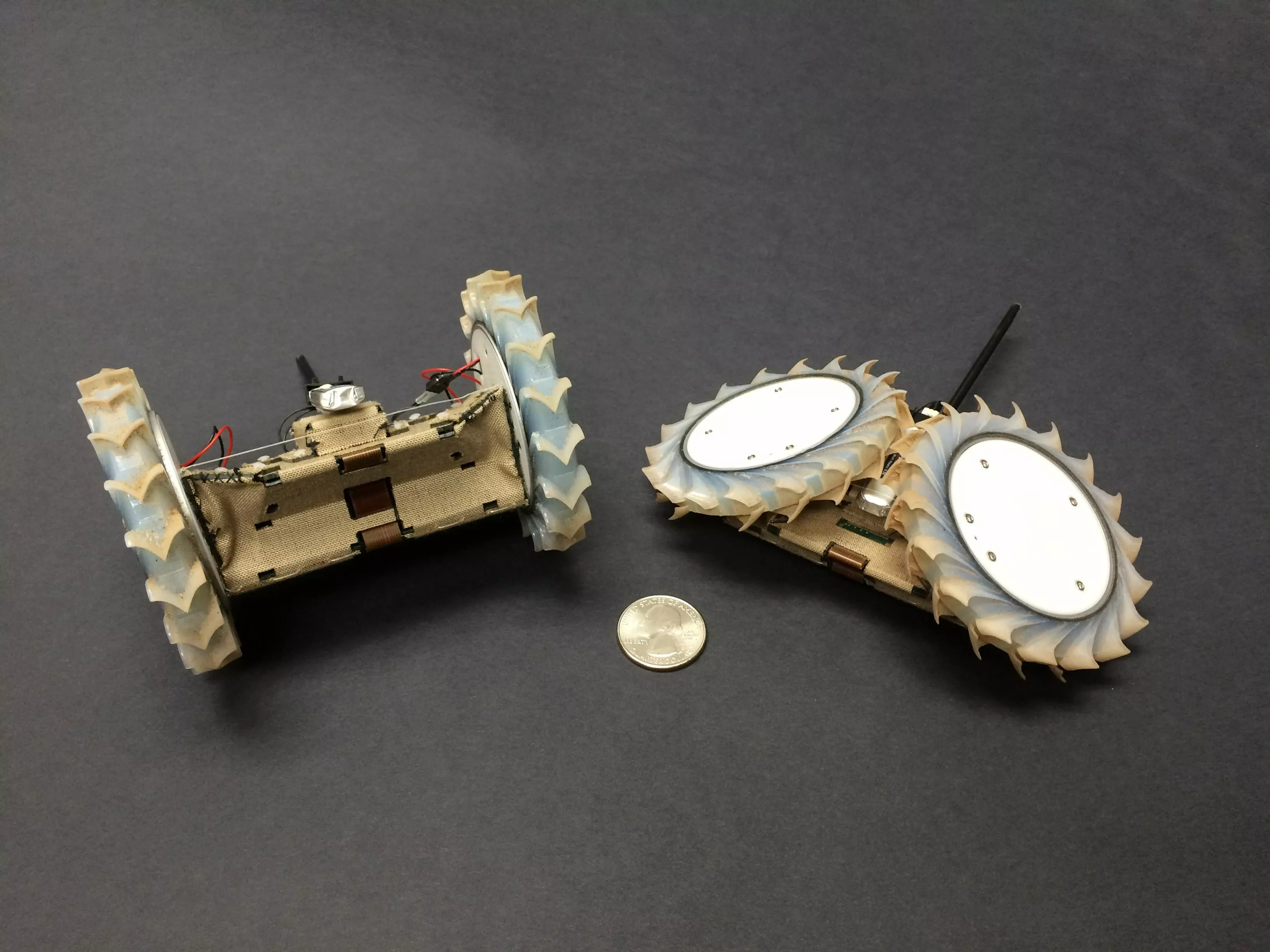
L'agence américaine a ainsi présenté le robot Puffer (Pop Up Flat Folding Explorer Robot), un robot qui viendra épauler les prochains rovers et qui a la particularité de se déplier comme un origami.
Le petit robot pourrait ainsi assister un rover plus grand en le précédant pour établir un parcours idéal, ou en permettant de tourner autour du rover pour diagnostiquer des problèmes.
A termes, la NASA pourrait également privilégier ce type de robots et les envoyer sous la forme de nuée sur Mars ou d'autres planètes pour couvrir une zone d'exploration bien plus large en un minimum de temps. Chaque robot pourrait avoir sa spécificité et être envoyé en plusieurs exemplaires en remplacement pour répondre à une panne éventuelle.

