



La robotique en essaim est une approche encore en devenir qui s'inspire comme bien souvent de la nature et ici des insectes. Grâce à de l'intelligence artificielle, des robots relativement simples peuvent former un ensemble d'un plus grand intérêt au vu de leurs interactions mutuelles. Pour assembler ces robots, il y a l'idée des phéromones artificielles.
C'est en fait essentiellement l'idée d'une communication basée sur un mode de fonctionnement comme avec les phéromones biologiques qui est reprise. Des chercheurs de l'université britannique de Lincoln estiment avoir réalisé une percée afin de mieux comprendre les fondements d'une telle communication débouchant sur une intelligence distribuée.
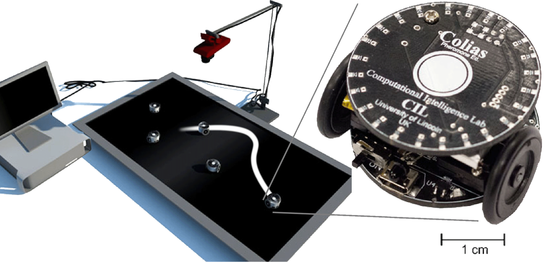
Leur système COS-phi (Communication System via Pheromone) est composé d'un écran LCD, une caméra USB, de microrobots et de modules logiciels en Open Source. L'écran LCD affiche la distribution spatiale des phéromones qui sont détectées par les robots qui s'y déplacent.
La caméra permet de renseigner sur les positions des robots afin de libérer des phéromones qui sont affichées sur l'écran sous la forme de pistes visuelles. Ce sont ces pistes visuelles qui sont détectées par deux capteurs de lumière sur les robots. Ces capteurs reproduisent les antennes de fourmis.
Les chercheurs proposent ainsi un environnement à bas coût et contrôlable au niveau de la diffusion, l'évaporation et la densité de phéromones artificielles. Des phéromones individuelles peuvent aussi être programmées en utilisant différentes couleurs. De quoi permettre de mener diverses expériences dans le domaine de la robotique en essaim en utilisant un moyen de communication efficace comme celui des phéromones qui est difficile à reproduire.
Avec le système COS-phi, les chercheurs ont observé que les microrobots sont capables de suivre celui qui distribue les phéromones sans aucune instruction spécifique envoyée. La robotique en essaim ouvre des perspectives pour l'accomplissement de certaines tâches dans des milieux difficiles d'accès.

