



Des chercheurs chinois ont mis au point HumanoidExo, un exosquelette léger capable d'enregistrer les mouvements humains pour entraîner des robots humanoïdes.
Cette approche réduit drastiquement les coûts et le temps d'apprentissage, permettant à un robot d'apprendre à marcher et à manipuler des objets avec une efficacité décuplée après seulement quelques démonstrations.
La course mondiale à la création de robots humanoïdes autonomes bat son plein. Des géants comme Nvidia ou Google DeepMind sont en première ligne. Cependant, un obstacle majeur freine leur déploiement à grande échelle : la difficulté et le coût exorbitant de leur apprentissage. Apprendre à une machine à se mouvoir avec la fluidité d'un humain reste, encore aujourd'hui, un défi de taille.
HumanoidExo, la réponse au gouffre des données
Pour contourner ce problème, une équipe de chercheurs de l'Université Nationale de Technologie de la Défense en Chine, en partenariat avec le fabricant Midea Group, a présenté une solution innovante : HumanoidExo.
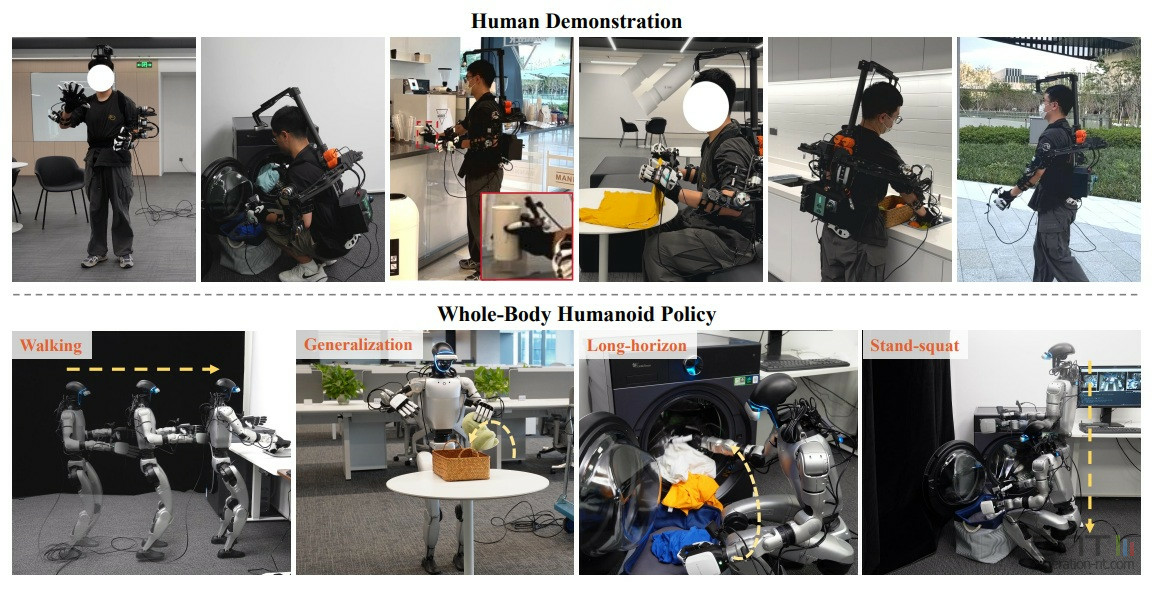
Il s'agit d'un exosquelette léger et portable conçu pour enregistrer l'intégralité des mouvements d'un corps humain, des bras aux jambes en passant par le torse. Ces données sont ensuite converties en un format structuré, directement exploitable par un robot.
Le dispositif permet d'en finir avec la dépendance aux données vidéo ou simulées, souvent peu fiables et à l'origine des problèmes d'équilibre chroniques chez les humanoïdes.
Comment fonctionne cette technologie de capture ?
Le secret de HumanoidExo réside dans une cartographie précise du mouvement. La combinaison suit sept articulations du bras humain, les transposant directement à la configuration du robot.
Des capteurs inertiels placés sur les poignets et une unité LiDAR dans le dos permettent de suivre en temps réel la position du torse et la taille de l'opérateur. Ce flux de données brutes est ensuite traité par un système d'intelligence artificielle à double couche, baptisé HumanoidExo-VLA.
Il combine un modèle Vision-Langage-Action pour interpréter la tâche à accomplir et un contrôleur basé sur l'apprentissage par renforcement qui assure le maintien de l'équilibre du robot pendant ses déplacements.
Des résultats spectaculaires avec le robot Unitree G1
Les tests menés sur un robot humanoïde Unitree G1 sont particulièrement éloquents. Avec un jeu de données hybrides, composé de seulement cinq démonstrations téléopérées et 195 sessions enregistrées via l'exosquelette, le robot a vu son taux de réussite sur une tâche de saisie et de placement bondir de 5 % à près de 80 %.
Fait encore plus impressionnant, la machine a appris à marcher en observant simplement un humain se déplacer vers une table, alors même que la marche ne faisait pas partie des instructions directes de son entraînement. Lors des essais, le robot a même pu récupérer sa position et achever sa tâche après avoir été délibérément poussé par les chercheurs.
Cette avancée s'inscrit dans une compétition mondiale intense, où des acteurs comme Figure AI aux États-Unis ou l'entreprise française Wandercraft, initialement spécialisée dans les exosquelettes médicaux, se tournent aussi vers les robots humanoïdes.
La technologie de Wandercraft, développée depuis une décennie, trouve une application naturelle dans ce nouveau marché. L'approche HumanoidExo suggère cependant une voie plus accessible, un futur où enseigner des tâches complexes à un robot pourrait devenir aussi simple que de lui montrer l'exemple en chair et en os.

